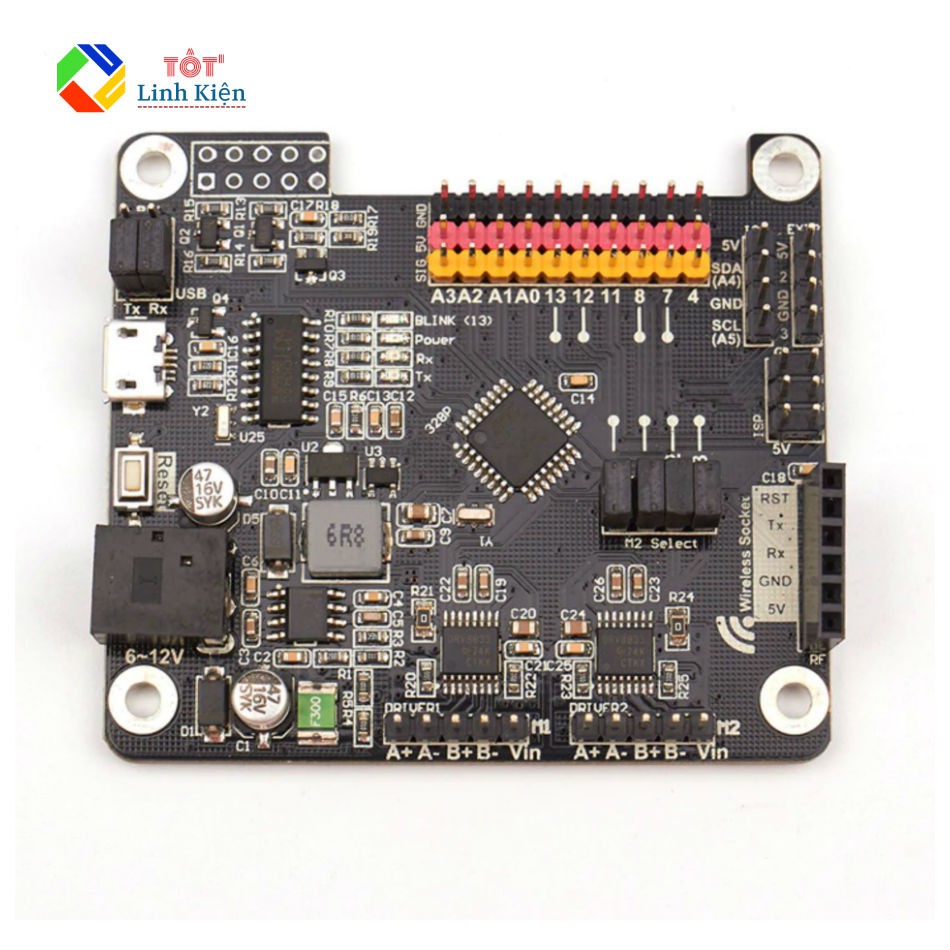






Rosbot là board chính được thiết kế cho phần mềm Kittenblock (dựa trên scratch 3.0), tương thích Arduino. Scratch 3.0 là phần mềm lập trình dạng kéo thả để thực hiện các bài toán logic. Dễ dàng sử dụng. Board Rosbot có thể điều khiển dạng robot khác nhau mà không cần mở rộng, hỗ trợ.
Đặc tính nổi bật Board Rosbot KittenBot Scratch 3.0
- Hỗ trợ lập trình kéo - thả trên Scratch 3.0
- Nâng cấp cho Raspberry Pi 2, Raspberry Pi 3B+
- Hỗ trợ 4 motor DC và 2 stepper motor (hoặc 8 servo motor)
- Điều khiển cùng lúc 13 cảm biến
- Hỗ trợ module wifi KittenBot Esp8266
- Hỗ trợ chương trình wireless và uploading
- Đầu vào/ra kỹ thuật số I/O kỹ thuật số: 2, 3, 4, 7, 8, 11, 12, 13
- I/O tương tự Đầu vào/đầu ra tương tự: A0 – A5
- Đầu vào/ra kỹ thuật số I/O kỹ thuật số: 2, 3, 4, 7, 8, 11, 12, 13
- I/O tương tự Đầu vào/đầu ra tương tự: A0 – A5
- Bảo vệ quá dòng: Cầu chì có thể đặt lại.